Auto Bird
Auto Bird
Predictive driving Assistant
We often encounter some sudden changes in the environment in road driving, including the surrounding drivers will suddenly change their driving behavior for some reason, and the surrounding vehicles can only make the corresponding slowdown or dodge according to the sudden situation.
In a complex traffic environment, How can drivers see changes in road conditions in advance that they cannot see? How can drivers notify other vehicles around them earlier before they change their vehicle’s driving behavior?
The Goal: To give drivers a wider perspective and to improve the driver’s behaviors and anticipate the potential dangerous circumstances.
1. Understand the problem
In order to better understand the driving environment on the road, I first made some observations on the road, and then I also wore the go pro for 2500km of driving experience and recording so that I could better understand the difficulties and pain points of driving.

It is obvious to observe that in some environments where there are more vehicles, it is difficult for the driver to maintain sufficient safety distance. When I sit in the car, as my observation of the road changes from overhead to flat view, it is more difficult for the driver to estimate the distance, and the sight obstacle becomes more, based on my observation of road driving, I simulated several road driving Senarios with 3d model.
Scenario 1
It happens quite often that other cars carelessly change lanes at a very short distance, in such a panic situation, to avoid a rear-end collision, one must even take a hazard braking.
Scenario 2
There are also phenomena such as the so-called “shockwave” effect. Because of a short distance and information deficient light system in the car, a single driver slowing down because of the light of the front car, a snowball effect develops, which eventually leads to traffic jam.
Scenario 3
Because of the obstruction of view by larger vehicles, it is also possible that the other vehicles may not be seen as early as possible.
Scenario 4
Drivers and vehicles have different behaviours and performance. If a lot of vehicles drives off at a crossroads, the different acceleration of the vehiclesc can cause more times unnecessary braking, not all vehicles can pass the intersection in green.
Because of the driver’s visual angle, the distance between cars is difficult to measure with eyes. In addition, it is also difficult to estimate by rearview mirror with rear vehicles.
2. Describe the problem
How (difficult) to keep a safe distance?
At 100kmh, the safety distance is 50m (according to Germany StVO). If a vehicle in front has an sudden accident, considering the driver’s reaction time, it takes at least 100 meter to stop the vehicle, in this case, the rear- end collision or emergency braking is unavoidable. The safety distance has to be doubled to 100 meter in bad weather or bad road conditions. In narrow streets, for example, at the construction site, the safety distance must be doubled, so that the vehicle on the side lane can shear in.
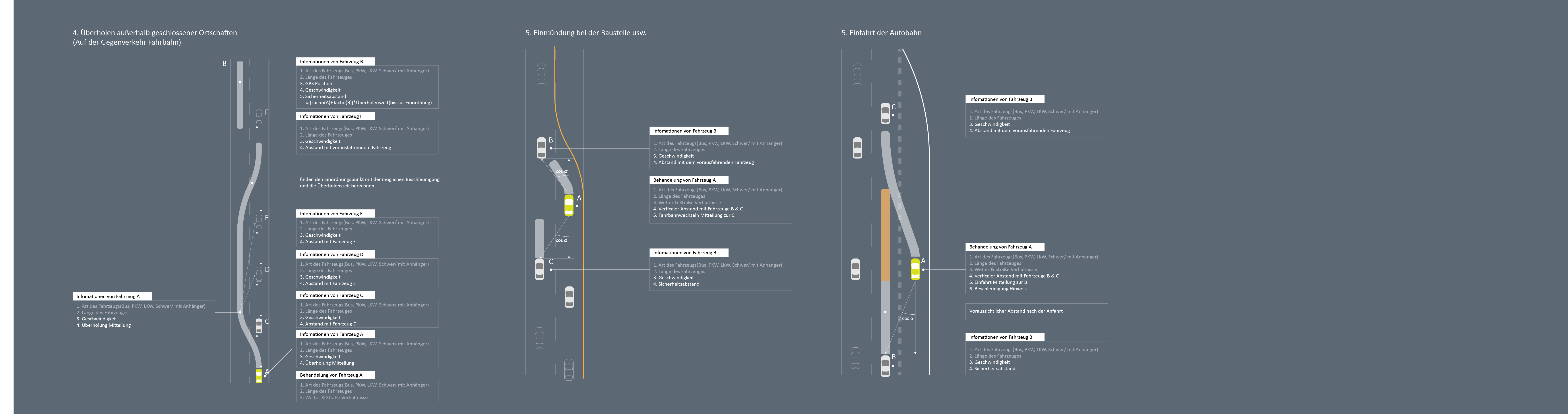
In addition, if driver wants to overtake the front vihichle (for example 80kmh) in the reverse lane, the overtaking distance is at least 550m, which means that the driver must keep at least 600m distance with oncoming traffic. This distance is not possible to measure with eyes. If wants to overtake more than one vehicle at the same time, the safety distance is even much longer.
In reality, drivers who want to overtake in the reverse lane will be prudent to estimate whether there will be reverse traffic. In fact, every overtaking is like a gamble.
3. Solutions - digital assissant and connectivity
The goal of the design is to enable the driver to “see” further and anticipate road conditions in advance.
Computers and sensors have played an increasingly important role in driving assistants. They help and offer the driver a wider view of the road information. Radars can help measure the distance with the other vehicles, cameras can offer drivers more perspective of view. But how could driver see even further and wider, if all vehicles can share the information with each other?
With the ablity of the connectivity, there is a new possibility. Through connecting with other vehicle. The driving assisstant could know the relative position of other vehicles, how fast are they, which direction are they going, if there is barrier in front of the front vehicle. With all the information, the system can count on correct safe distance for the driver.
A short animation is to show how connectivity works. With the help of the sensors in the car, the visibility is greater than the driver’s eye. By connecting with the cars nearby, a dynamic network is established, showing how fast all cars are, which lane, how the other drivers to behave. The traffic information collected by sensors can be shared. And the visibility can always be further, enabling predictive driving.
4. Design research
I classify all scenarios according to different road conditions and drivers’ berhaviours. The design was carried out and tested.
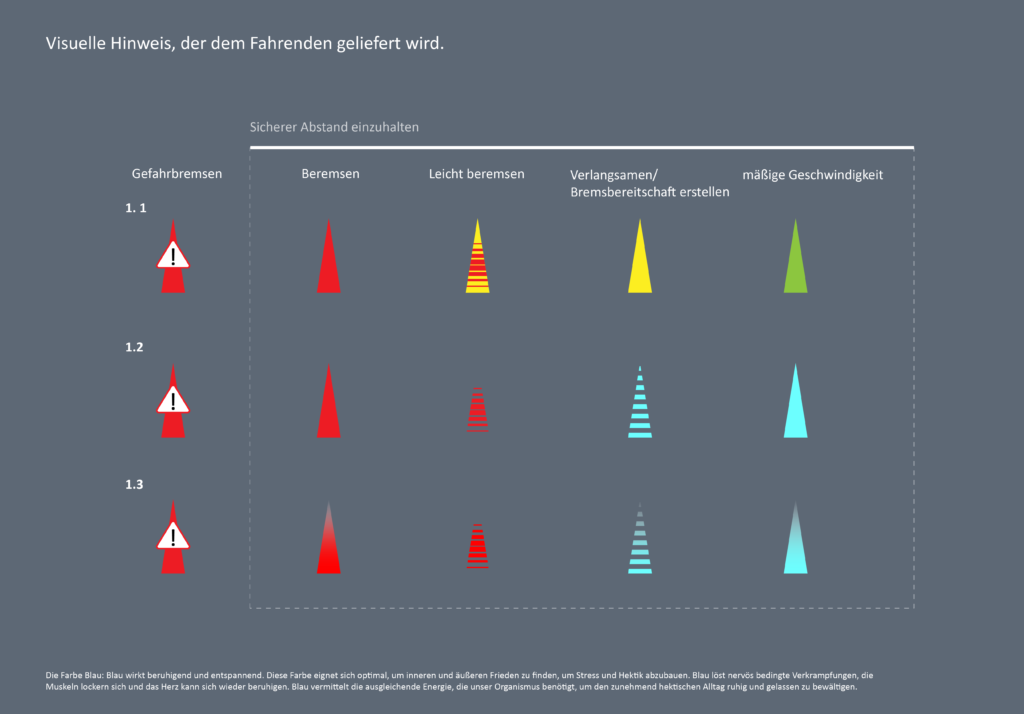
5. Interface
On the windshield in front of the steering wheel, the main icon shows the car the driver is driving.
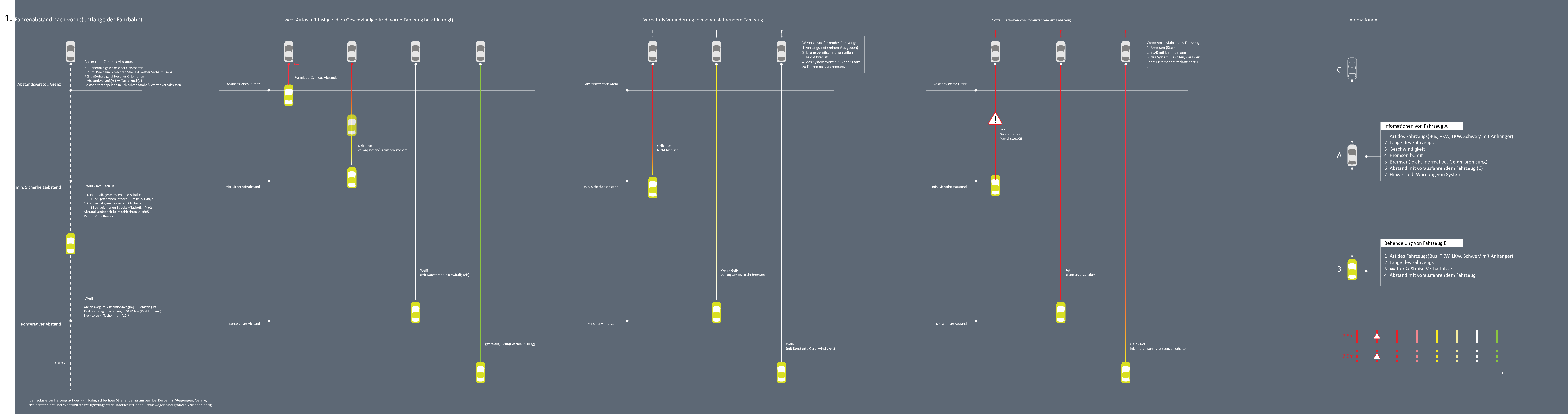
First, safety distance is to keep safe distance. It is defined in 3 levels, the more shown means that the danger is approaching, the driver should have higher attention and with corresponding behaviour: slow down or break to keep longer distance, until that no longer lit.
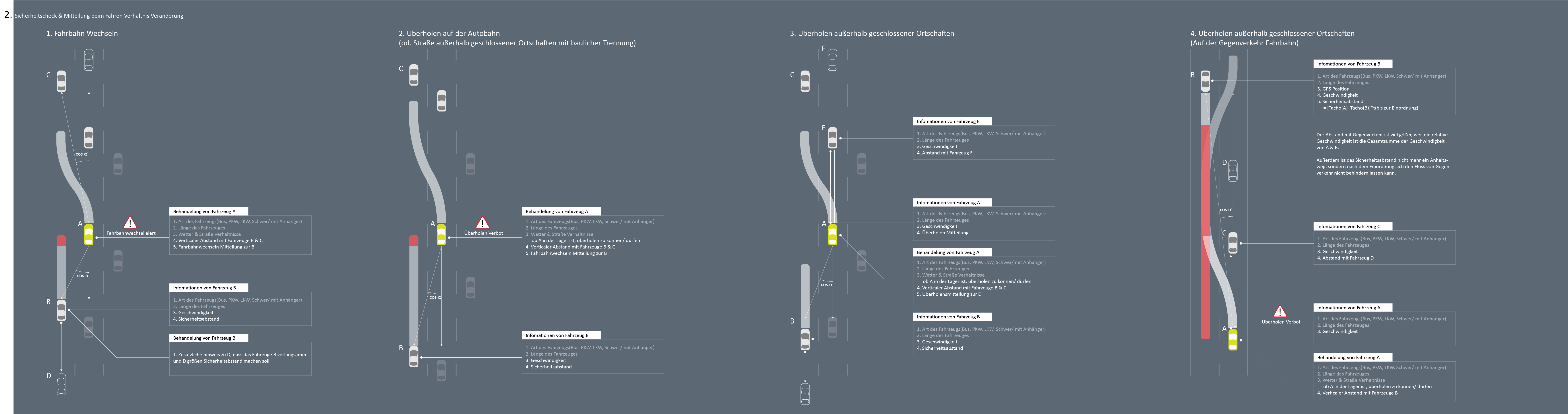
Second, the side lane information, the interaction of the interface works by turning signal lever. When driver sets turn signals and wants to change lane. The system will show the driver whether there is already car next to lane within safety distance (or in blind spot), and where that is, behind me or in front of me, faster than me or slower than me.
It also shows the oncoming traffic when the driver wants to overtake on the opposite lane and sets the flashing lights. If the red light is on, the driver may not switch to the opposite lane because the passing route is not sufficient. It is also shown when oncoming traffic comes on a narrow road with a curve and visibility problem. And car from other direction.
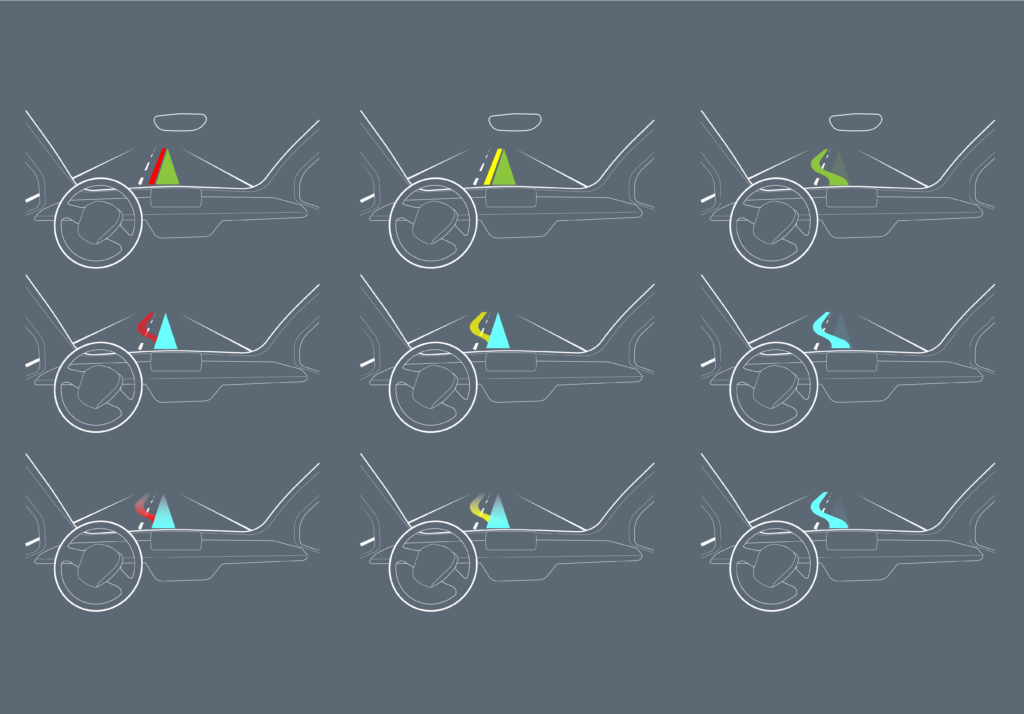
6. Interface Demo
Enter the highway, the driver must accelerate quickly to the appropriate speed. And on the one hand keep eyes on cars on the left side, on the other hand look the traffic signs on the right side. With the head-up-display Assistent: the driver can decide the timing to get into the lane.↓
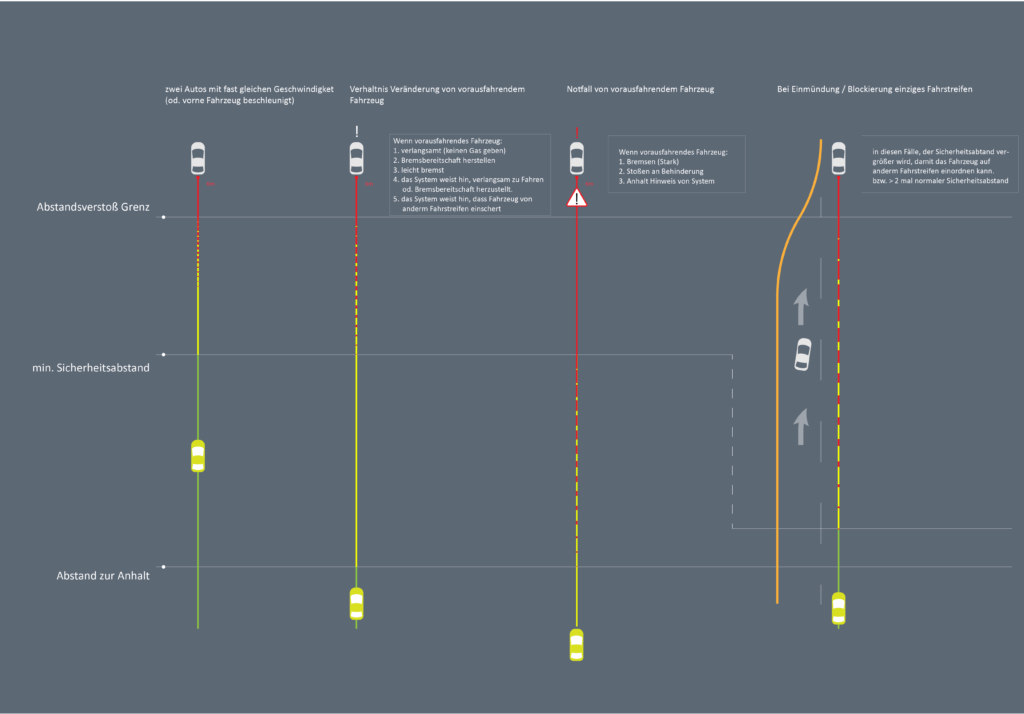
On the event of barrier on lane or unexpected danger, the system will inform the driver as early as possible and slow down or slow down to avoid unnecessary danger braking and stopping.
The information is delivered from preceding vehicle to behind. And lets the driver keep longer distance sooner.↓
The Assistent can tell the driver if it is now allowed to change lane.↓
At the confluence of the roads, there is often visual obstruction that one can not watch the cars in right of way street well.↓
If the driver wants to overtake on the opposite lane. Because of obstruction of visibility of the vehicle ahead, it is difficult to see the oncoming traffic, and can not know if there is still vehicle, in front of the car. After overtaking, the system points to the driver, leaving enough distance for the vehicles behind.↓
At the construction site, ie road narrows, the driver should perform a zipper merge procedure. It can also happen if there is an accident or a vehicle in the road breakdown, a lane can no longer be driven on. If detected too later, the cars will stop and cause traffic jams. If the situation is anticipated, the congestion will be avoided.
if the right lane is blocked, the system points to cars(drivers) on right lane that there is barrier. At the same time, the system let the cars(drivers) on left lane keep longer distance, to let the cars on right lane easy to get in. Thus, the traffic flow will smoothly and safely pass the narrow zone.↓